前提知识:(自行了解)
- 等效焦距和实际焦距是什么
- 全画幅尺寸
- 4:3 和 3:2 比例的画幅
- 像素以及分辨率
- 快门速度
- 感光度 ISO 与噪点
- 全自动曝光以及快门优先以及光圈优先是什么
1. 根据重叠率计算图片之间的间隔距离
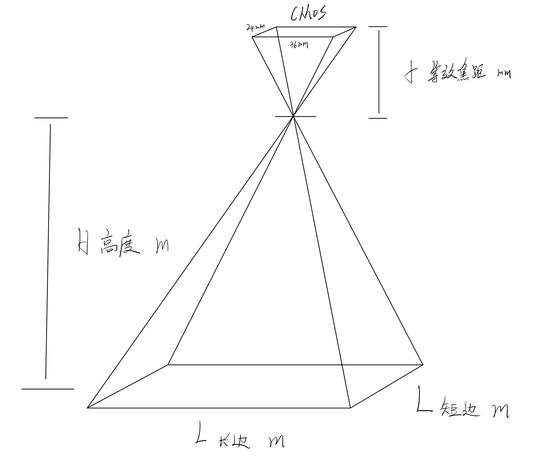
4:3 系统用等效焦距计算时,CMOS 尺寸按 36mm * 27mm 计算
3:2 系统用等效焦距计算时,CMOS 尺寸按 36mm * 24mm 计算
4/3 系统:Mavic 2 Zoom、Mavic Pro、Mavic Air、Spark、Phantom 4、ZENMUSE X5S
3/2 系统:Phantom 4 Adv/Pro/RTK、Mavic 2 Pro、ZENMUSE X4S、ZENMUSE X7
根据相似三角形,单张照片能拍摄到的景物(这里以 3:2 系统来举例):
L 长边 = 36 * h / f
L 短边 = 24 * h / f
根据重叠率 (包括航向重叠率和旁向重叠率),根据飞行方向,间隔距离为:
L 航向间隔 = L 短边 * (1 - 航向重叠率)
L 旁向间隔 = L 长边 * (1 - 旁向重叠率)
航线的旁向间距即等于 L 旁向间隔
2.计算 GSD
地面采用间隔,传感器瞬时视场内观察到地面的长(宽)度,即一个像素对应的实际物理地面大小,单位为厘米
GSD (cm) = L长边 / 长边像素 * 100 = L 短边 / 短边像素 * 100
3.计算飞行速度与快门间隔时间
因为在常规的测绘相关任务中,我们使用的是等时间间隔拍照,所以需要计算飞行速度与快门间隔时间来使航线间隔符合要求。
为了安全起见,飞行速度只能处于 1m/s 到 10m/s 之间,所以需要平衡快门间隔时间和飞行速度。
V 飞行速度 = L航向间隔 / 间隔时间 (间隔时间只能以秒为单位,区间 2s – 60s)
4.计算安全快门
DJI 的自动曝光,当环境光线过于弱的时候,会自动调低快门速度,比如 1/30 秒,而无人机在高速飞行,这个时候可能会产生拖影,对建模非常的不利。
为了不产生拖影,在快门打开的一瞬间,飞机飞过的距离应该小于 GSD 距离
T 安全快门 = GSD (cm) / 100 / V 飞行速度 / N 系数
(系数 N 存在是因为当 N 为 1 时,理论上还是有一个像素的拖影,其实 N 应该大于 1,以后根据实际飞行情况,调整 N 以达到最佳)
理论上说,快门速度快于安全快门,可以保证不产生拖影。实际作业中,选择一个合适的快门速度设置快门优先模式曝光即可。
5.判断是否适合作业
当计算出合适的飞行速度、安全快门、以及快门间隔后,设置相机模式为快门优先,其他自动模式
无人机飞行中,读取 ISO 参数,如果 ISO 大于 1000(这个值可以根据不同相机型号设置阈值,比较好的相机噪点压制也好),可能已经会产生比较明显的噪点,可以考虑 App 中提示环境不适合飞行。
其他题外话
通过上述计算其实可以发现,飞行速度、快门间隔、安全快门 三者之间,存在相互影响的关系,
飞行速度快,可以更快完成任务,但是可能会导致安全快门需要足够快,从而对天气有要求,通过不同的快门间隔可以均衡飞行速度和安全快门之间的关系。
这里的判断逻辑可以有多种方法做为取舍,我这边考虑后给出的建议:
设置一档设置名称如下:
|------------------@------------------| # @ 是滑块
更好高的画质 标准 更快的速度
滑动滑块在更好的画质和更快的速度做均衡,
更好的画质让飞行速度维持在 4 – 6 m/s 之间
标准让飞行速度维持在 6 – 8 m/s 之间
更快的速度让飞行速度维持在 8 – 10 m/s 之间
其他可以优化的地方(还存在的问题)
上述 h 高度是理想情况,地面平整,而实际上,测绘的区域可能有高程上的变化,这个时候设置重叠率和实际重叠率会产生一定的误差,同时其他实际参数都会产生变化。当前解决方案,需要在各个参数中留一些冗余。